Study Log (2019.12)
2019-12-31
- Reinforcement Learning
- Chapter 8. Planning and Learning with Tabular Methods
- 8.1 Models and Planning
- 8.2 Dyna: Integrated Planning, Acting, and Learning
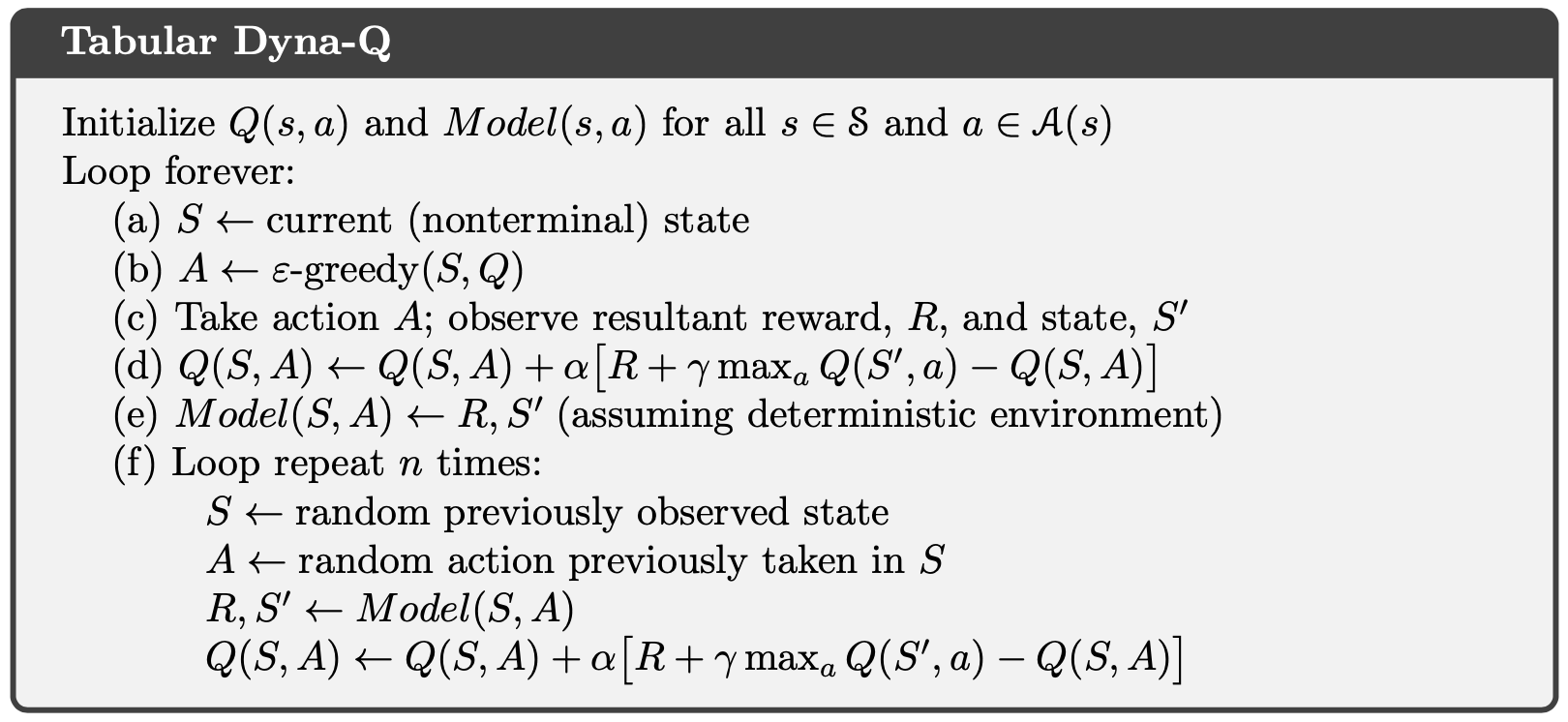
- Page #166
- Chapter 8. Planning and Learning with Tabular Methods
2019-12-30
- Reinforcement Learning
- Chapter 7. n-step Bootstrapping
- 7.4 Per-decision Methods with Control Variates
- 7.5 Off-policy Learning Without Importance Sampling: The n-step Tree Backup Algorithm
- 7.6 A Unifying Algorithm: n-step Q($\sigma$)

- 7.7 Summary
- Chapter 8. Planning and Learning with Tabular Methods
- 8.1 Models and Planning
- Page #161
- Chapter 7. n-step Bootstrapping
- endtoendAI
2019-12-29
- Reinforcement Learning
- Chapter 7. n-step Bootstrapping
- 7.4 Per-decision Methods with Control Variates
- Page #151
- Chapter 7. n-step Bootstrapping
- N-step TD Method
- 모두를 위한 머신러닝/딥러닝 강의
2019-12-28
- Reinforcement Learning
- Chapter 7. n-step Bootstrapping
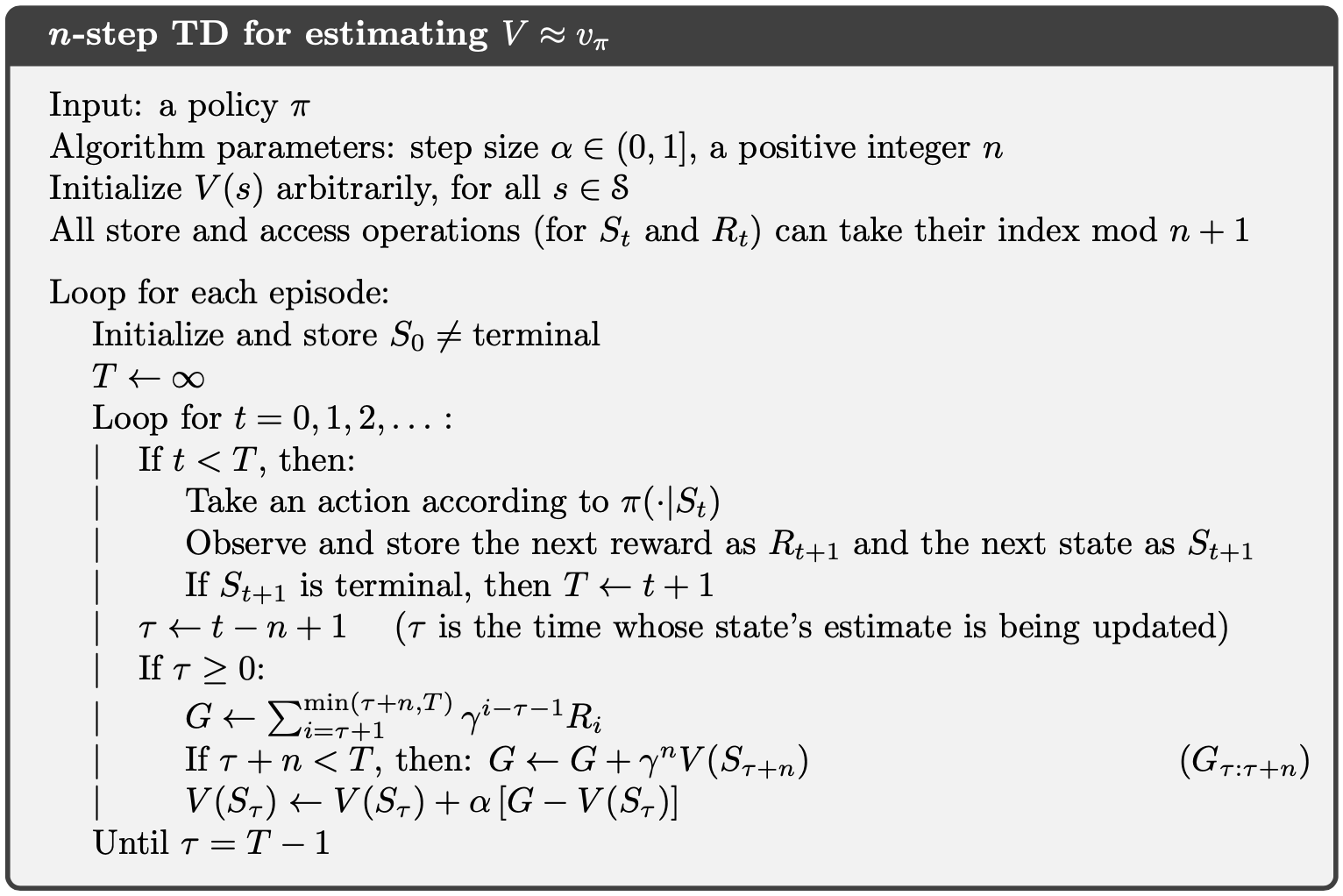
- 7.1 n-step TD Prediction
- 1) n-step까지 Discounted Reward 합계 G 계산 : $G \leftarrow \sum\nolimits_{i=\tau+1}^{min(\tau+n,T)} \gamma^{i-\tau-1} R_i$
- 2) n-step에서의 Value 계산 (n-step 이후의 Reward 함축) : $G \leftarrow G + \gamma^n V(\color{red}{ S_{\tau+n} })$
- 3) V 업데이트 : $V(S_\tau) \leftarrow V(S_\tau) + \alpha [G - V(\color{red}{ S_\tau })]$
- RandomWalk.py
- 1) n-step까지 Discounted Reward 합계 G 계산 : $G \leftarrow \sum\nolimits_{i=\tau+1}^{min(\tau+n,T)} \gamma^{i-\tau-1} R_i$
- 7.2 n-step Sarsa
- 7.3 n-step Off-policy Learning
- 7.4 Per-decision Methods with Control Variates
- 7.1 n-step TD Prediction
- Page #150
- Chapter 7. n-step Bootstrapping
2019-12-27
- Reinforcement Learning
- Chapter 6. Temporal-Difference Learning
- 6.6 Expected Sarsa
- 6.7 Maximization Bias and Double Learning
- 6.8 Games, Afterstates, and Other Special Cases
- 6.9 Summary
- Chapter 7. n-step Bootstrapping
- 7.1 n-step TD Prediction
- Page #143
- Chapter 6. Temporal-Difference Learning
- 모두를 위한 머신러닝/딥러닝 강의
- Lecture #33) lec10-4: 레고처럼 넷트웍 모듈을 마음껏 쌓아 보자
- Lecture #34
- Lecture #35
- Lecture #36
- Lecture #37
- Lecture #38
- Lecture #39
2019-12-25
- Reinforcement Learning
- Chapter 6. Temporal-Difference Learning
- 6.1 TD Prediction
- 6.2 Advantages of TD Prediction Methods
- 6.3 Optimality of TD(0)
- 6.4 Sarsa: On-policy TD Control
- 6.5 Q-learning: Off-policy TD Control
- Page #133
- Chapter 6. Temporal-Difference Learning
2019-12-24
- SanghyukChun’s Blog
- Reinforcement Learning
- Chapter 5. Monte Carlo Methods
- 5.7 Off-policy Monte Carlo Control
- 5.8 Discounting-aware Importance Sampling
- 5.9 Per-decision Importance Sampling
- 5.10 Summary
- Page #119
- Chapter 5. Monte Carlo Methods
2019-12-23
2019-12-22
- SanghyukChun’s Blog
- Machine Learning 스터디 (5) Decision Theory
- Machine learning 스터디 (6) Information Theory
- Machine learning 스터디 (7) Convex Optimization
- Machine learning 스터디 (8) Classification Introduction (Decision Tree, Naïve Bayes, KNN)
- Machine learning 스터디 (13) Clustering (K-means, Gaussian Mixture Model)
- Machine Learning 스터디 (14) EM Algorithm
- Machine Learning 스터디 (16) Dimensionality Reduction (PCA, LDA)
- 모두를 위한 머신러닝/딥러닝 강의
- Lecture #31) lec10-2: Weight 초기화 잘해보자
- Lecture #32
2019-12-21
2019-12-20
- 숨니의 무작정 따라하기
- [Ch.8] Value Function Approximation
- [Ch.9] DQN(Deep Q-Networks)
- [Part 0] Q-Learning with Tables and Neural Networks
- [Part 1] Multi-armed Bandit
- [Part 1.5] Contextual Bandits
- [Part 2] Policy-based Agents(Cart-Pole Problem)
- [Part 3] Model-based RL
- [Part 4] Deep Q-Networks and Beyond
- [Part 5] Visualizing an Agent’s Thoughts and Actions
- [Part 6] Partial Observability and Deep Recurrent Q-Networks
2019-12-19
2019-12-17
2019-12-16
2019-12-15
- 강화학습 기초부터 DQN까지
- Page #143
- 숨니의 무작정 따라하기
2019-12-14
- Reinforcement Learning
- Chapter 5. Monte Carlo Methods
- 5.5 Off-policy Prediction via Importance Sampling
- 5.6 Incremental Implementation
- Page #110
- Chapter 5. Monte Carlo Methods
- 강화학습 기초부터 DQN까지
- Page #90
2019-12-10
- Reinforcement Learning
- Chapter 4. Dynamic Programming
- 4.2 Policy Improvement
- 4.3 Policy Iteration
- 4.4 Value Iteration
- 4.5 Asynchronous Dynamic Programming
- 4.6 Generalized Policy Iteration
- 4.7 Efficiency of Dynamic Programming
- 4.8 Summary
- Chapter 5. Monte Carlo Methods
- 5.1 Monte Carlo Prediction
- 5.2 Monte Carlo Estimation of Action Values
- 5.3 Monte Carlo Control
- 5.4 Monte Carlo Control without Exploring Starts
- 5.5 Off-policy Prediction via Importance Sampling
- Page #104
- Chapter 4. Dynamic Programming
2019-12-04
- Reinforcement Learning
- Chapter 3. Finite Markov Decision Processes
- 3.1 The Agent–Environment Interface
- 3.2 Goals and Rewards
- 3.3 Returns and Episodes
- 3.4 Unified Notation for Episodic and Continuing Tasks
- 3.5 Policies and Value Functions
- 3.6 Optimal Policies and Optimal Value Functions
- 3.7 Optimality and Approximation
- 3.8 Summary
- Chapter 4. Dynamic Programming
- 4.1 Policy Evaluation (Prediction)
- 4.2 Policy Improvement
- Page #79
- Chapter 3. Finite Markov Decision Processes
2019-12-03
- Reinforcement Learning
- Chapter 2. Multi-armed Bandits
- 2.7 Upper-Confidence-Bound Action Selection
- 2.8 Gradient Bandit Algorithms
- 2.9 Associative Search (Contextual Bandits)
- 2.10 Summary
- Page #47
- Chapter 2. Multi-armed Bandits
2019-12-02
- 모두를 위한 머신러닝/딥러닝 강의
- Reinforcement Learning
- Chapter 1. Introduction
- 1.4 Limitations and Scope
- 1.5 An Extended Example: Tic-Tac-Toe
- 1.6 Summary
- Chapter 2. Multi-armed Bandits
- 2.1 A k-armed Bandit Problem
- 2.2 Action-value Methods
- 2.3 The 10-armed Testbed
- 2.4 Incremental Implementation
- 2.5 Tracking a Nonstationary Problem
- 2.6 Optimistic Initial Values
- Page #35
- Chapter 1. Introduction
2019-12-01
- Fundamental of Reinforcement Learning
- Chapter 4. Dynamic Programming
- Chapter 5. Monte-Carlo Methods
- 모두를 위한 머신러닝/딥러닝 강의
- Lecture #25) lec9-1: XOR 문제 딥러닝으로 풀기
- Lecture #26
- Lecture #27
- Lecture #28
- Lecture #29
- Reinforcement Learning
- Chapter 1. Introduction
- 1.1 Reinforcement Learning
- 1.2 Examples
- 1.3 Elements of Reinforcement Learning
- Page #7
- Chapter 1. Introduction
2019-11-30
- 모두를 위한 머신러닝/딥러닝 강의
- Lecture #14) ML lec 6-1 - Softmax Regression: 기본 개념 소개
- Lecture #15
- Lecture #16
- Lecture #17
- Lecture #18
- Lecture #19
- Lecture #20
- Lecture #21
- Lecture #22
- Lecture #23
- Lecture #24
- 파이썬과 케라스로 배우는 강화학습
-
- 강화학습 심화 3: 아타리
-
2019-11-29
- 강화학습 관련 자료
- Fundamental of Reinforcement Learning
- Chapter 1. Introduction
- Chapter 2. Markov Decision Process
- Chapter 3. Bellman Equation
Comments